





Cómo Conectar un Robot UR: Preparando tu Tarea
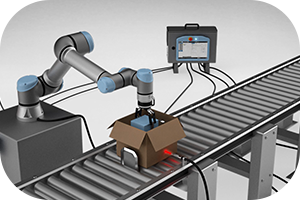
Una vez que te has familiarizado con el hardware básico, el siguiente paso en tu viaje de automatización es preparar al robot para una tarea específica. Este proceso implica darle “manos” y “ojos”, es decir, conectar las herramientas y sensores que le permitirán interactuar con su entorno. Si tu objetivo es conectar un robot para una aplicación de pick-and-place, este módulo es tu punto de partida práctico.
Aquí te guiaremos a través de los conceptos clave para la conexión de efectores finales, sensores y otros dispositivos a tu cobot Universal Robots.
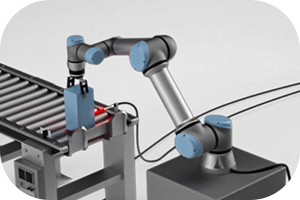
El Conector de Herramienta: El Punto de Unión
En la brida del robot (la cara final del brazo) se encuentra el conector de herramienta o Tool Connector. Este es el puerto principal que usarás para conectar un robot con su efector final, comúnmente una pinza o gripper.
Conexión Física y Lógica
La conexión es doble. Primero, acoplas físicamente la herramienta a la brida. Segundo, conectas el cable de la herramienta al Tool Connector. Este puerto no solo proporciona la energía necesaria para que la pinza funcione (generalmente 24V), sino que también establece la comunicación digital para que el robot pueda enviarle comandos como “abrir” o “cerrar”.
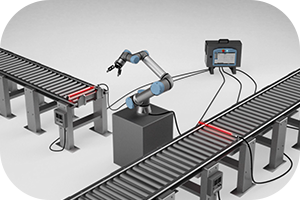
Integrando Sensores y Cintas Transportadoras
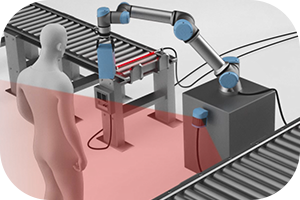
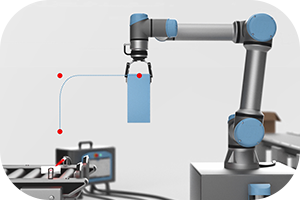
Para que un robot opere de forma inteligente, necesita percibir su entorno. Esto se logra mediante sensores. En una aplicación de pick-and-place, un sensor de proximidad es vital para detectar si hay una pieza lista para ser recogida.
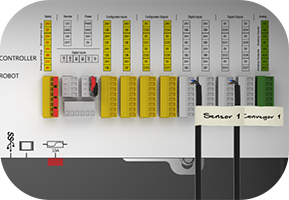
El Tablero de Control de Seguridad
Las conexiones de estos dispositivos externos se realizan en las terminales de Entradas/Salidas (I/O) ubicadas en el tablero de control dentro del gabinete principal. Para conectar un robot a un sensor, simplemente cableas el sensor a una de las entradas digitales disponibles. De manera similar, se conecta una cinta transportadora a una de las salidas para poder encenderla y apagarla desde el programa.
Configuración en PolyScope: Dando Nombre a las Entradas
Una vez que un sensor está físicamente conectado, el siguiente paso es configurarlo en la interfaz PolyScope. Una de las mejores prácticas que aprenderás es a renombrar las entradas y salidas. Por ejemplo, en lugar de recordar que tu sensor está en la “Entrada Digital 7”, puedes asignarle el nombre “Sensor_Pieza_Lista”. Esta simple acción hace que la programación sea mucho más intuitiva y fácil de depurar en el futuro.
La Configuración Inicial de la Aplicación
Antes de programar movimientos, es crucial realizar una configuración inicial en la pestaña de “Instalación” de PolyScope. Aquí es donde le dices al robot qué tipo de herramienta tiene conectada y cómo debe comportarse.
Activando el Efector Final
Dentro de la configuración, podrás activar la herramienta y definir parámetros básicos. Por ejemplo, puedes establecer los voltajes y las acciones de las I/O del efector final. Este paso asegura que, cuando ejecutes el programa, el comando de “agarrar pieza” funcione correctamente. Al completar estos pasos, habrás logrado conectar un robot no solo física, sino también lógicamente, dejándolo listo para recibir sus primeras instrucciones de movimiento.
<< Volver a la guía completa: Conoce el Curso e-Series Core Universal Robots >>





Your insights in this post are spot on. I can\’t wait to see what you write next!
Your content is a go-to source for me when I need information. Great work, as always!
Thank you for your kind words. I\’m delighted that you found the post enlightening.