





Cómo Controlar un Robot con Comandos: Set y Wait
Un robot que solo mueve su brazo es como un músico que sabe las notas pero no el ritmo. La verdadera magia de la automatización ocurre cuando el robot interactúa con su entorno. Este módulo te enseña a controlar un robot dándole la capacidad de actuar y esperar, sincronizando sus movimientos con otros dispositivos como pinzas (grippers) y sensores.
Para lograr esto, dominarás dos de los comandos más importantes en la programación de Universal Robots: Set (Establecer) y Wait (Esperar).
Usando el Comando “Set” para Controlar un Robot
El comando Set es tu principal herramienta de acción. Lo usas para enviar una orden, es decir, para cambiar el estado de una salida digital. Piensa en ello como presionar un interruptor.
Operando la Pinza (Gripper)
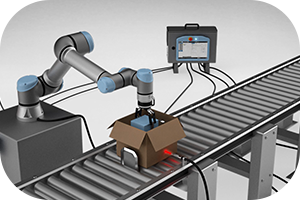
La aplicación más común del comando Set es operar un efector final. Para una pinza simple, la lógica es directa:
Set DO1 HIGH: Envía una señal a la Salida Digital 1 para cerrar la pinza.Set DO1 LOW: Envía una señal a la misma salida para abrir la pinza.
Este comando es la instrucción que transforma un waypoint de “posición de agarre” en una acción de “agarrar”.
Actualizando el Payload Dinámicamente
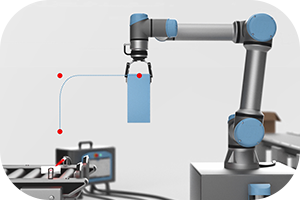
Una función más avanzada del comando Set es la de actualizar el payload (la carga) en tiempo real. Como viste en el Módulo 3, decirle al robot cuánto peso carga es vital para su precisión. Con Set Payload, puedes:
Set Payloada 1.2 kg justo después de que la pinza se cierra para recoger una pieza.Set Payloada 0.5 kg (el peso de la pinza sola) justo después de soltarla.
Esto permite controlar un robot con máxima precisión durante todo el ciclo de trabajo.
Sincronización y “Wait”: Cómo Controlar un Robot
Si Set es la acción, Wait es la paciencia. Este comando pausa la ejecución del programa hasta que se cumple una condición específica. Es la clave para sincronizar al robot con el mundo exterior.
Interactuando con Sensores
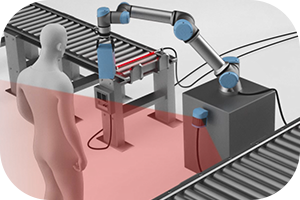
El uso más poderoso de Wait es para leer las entradas digitales, como las de un sensor. Imagina una pieza llegando en una cinta transportadora:
- El robot se mueve a una posición de espera.
- El programa ejecuta el comando:
Wait DI1 HIGH. - El robot se detiene y “escucha” la Entrada Digital 1. No hará nada más hasta que el sensor detecte la pieza y envíe la señal.
Esta es la base de la automatización inteligente y reactiva.
Usando “Wait” para Tiempos de Espera
A veces, la condición a esperar es simplemente el paso del tiempo. Después de un comando Set para cerrar una pinza, es buena práctica añadir un Wait: 0.5s. Esto le da al mecanismo tiempo suficiente para completar la acción física antes de que el robot intente moverse, evitando que la pieza se caiga.
Flujo de Programa para Controlar un Robot Interactivo
Al unir estos comandos, puedes controlar un robot para que ejecute una secuencia de pick-and-place robusta y sincronizada:
- Mover a la posición de espera.
- Wait a que el sensor detecte la pieza.
- Mover a la posición de agarre.
- Set para cerrar la pinza.
- Wait 0.5 segundos para asegurar el agarre.
- Set para actualizar el payload con el peso de la pieza.
- Mover para colocar la pieza en su destino.
Dominar Set y Wait transforma tus programas de simples coreografías a verdaderas aplicaciones industriales.
<< Volver a la guía completa: Conoce el Curso e-Series Core Universal Robots >>
<< Anterior: Módulo 4 - Cómo Programar un Robot UR con Waypoints
Siguiente: Módulo 6 – Programación de Robots con Hilos (Threads) >>






I\’m amazed at how you keep up with the latest gadgets and trends. Your blog is my primary source for staying updated in the tech world.
Happy to know you find it helpful.
This post is a game-changer. I\’ve learned so much from it – thank you!
I\’m impressed by your writing style and the depth of your knowledge on this topic.