







Si buscas iniciarte en la robótica colaborativa, el curso e-Series Core Track de la Academia Universal Robots es tu punto de partida ideal. Su contenido está diseñado para que aprendas de forma práctica a configurar y programar una aplicación real desde cero.
Este post sirve como una guía rápida del contenido. A continuación, encontrarás un resumen de los 8 módulos que componen el curso. Cada título enlazará a un artículo futuro donde exploraremos esos temas a fondo.
¿Listo para Empezar? Inscríbete al Curso de Universal Robots
El curso Core Track es online y gratuito. Puedes registrarte y comenzar a aprender a tu propio ritmo.
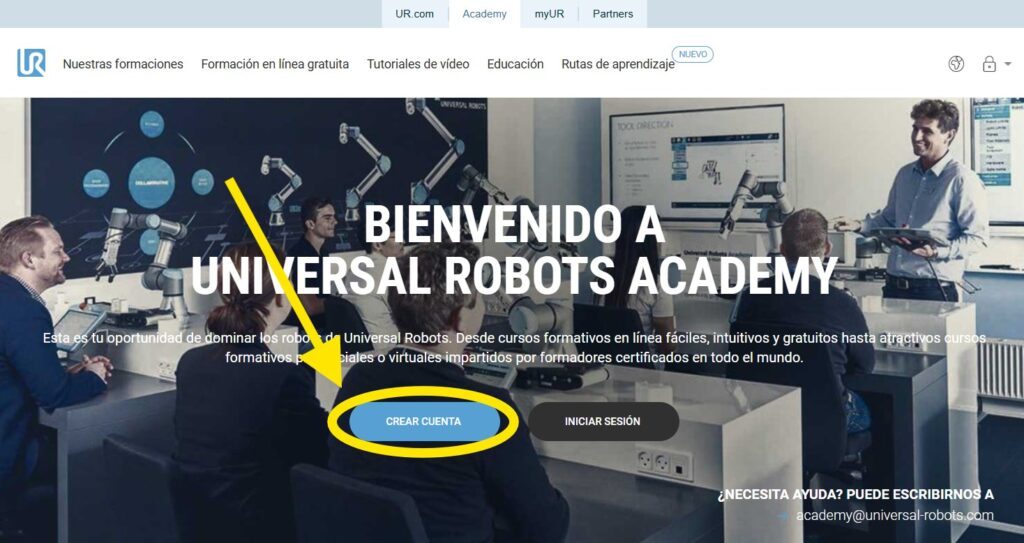
[>> Haz clic aquí para registrarte en la
Academia de Universal Robots <<]
Contenido del Curso: Resumen de los 8 Módulos
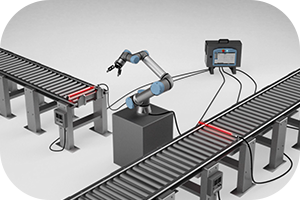
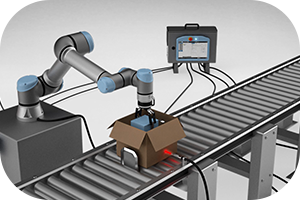
La formación se estructura en los siguientes bloques, culminando en una aplicación funcional de pick-and-place.
1. Conoce el Hardware del Robot UR
Una introducción al hardware del robot, la caja de control, el Teach Pendant (la tableta de programación) y funciones clave como el modo Freedrive para mover el brazo manualmente.
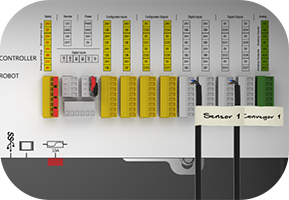
2. Cómo Conectar un Robot UR para Tareas
Aprenderás a conectar y configurar los componentes físicos para una tarea: el efector final (pinza), sensores y cintas transportadoras.
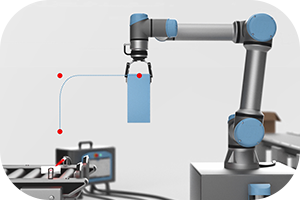
3. Cómo Configurar TCP en un Robot UR
Este módulo se enfoca en configurar la herramienta, definiendo el Punto Central de la Herramienta (TCP), el peso (Payload) y su centro de gravedad para asegurar movimientos precisos.
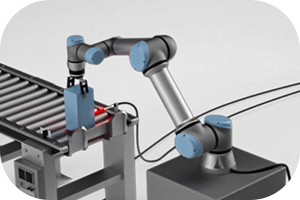
4. Cómo Programar un Robot UR con Waypoints
Aquí aprenderás sobre los tipos de movimiento del robot y cómo programar Waypoints (puntos de paso) para crear la trayectoria de la aplicación.
5. Cómo Controlar un Robot con Comandos
Se centra en el uso de comandos (Set, Wait) para operar la pinza y sincronizar las acciones del robot con las señales de dispositivos externos como los sensores.
6. Programación de Robots con Hilos (Threads)
Introduce el concepto de Threads (hilos de ejecución) para controlar procesos en paralelo, como manejar las cintas transportadoras mientras el robot ejecuta otras tareas.
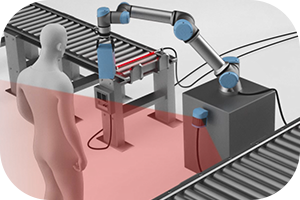
7. Seguridad en Robots: Guía de Ajustes UR
Un módulo crucial sobre la configuración de las funciones de seguridad colaborativa: paradas de emergencia, modo reducido, límites de operación y uso de escáneres de seguridad.
8. Cómo Optimizar un Robot UR: Guía Final
En la fase final, verás técnicas para optimizar el programa. Esto incluye ajustar la velocidad, la aceleración y usar el Blend Radius para suavizar movimientos y reducir los tiempos de ciclo.
Al finalizar estos módulos, habrás programado una aplicación de pick-and-place de principio a fin. ¡Sigue esta serie de artículos para explorar cada tema en detalle!



Your post is a true masterpiece. I\’ll be referencing it in my own work.
I\’m honored to hear that. I\’m always striving to provide the best information possible.
I\’m impressed by your writing style and the depth of your knowledge on this topic.