





Seguridad en Robots: Guía de Ajustes Esenciales en UR
Llegamos al módulo más importante de tu formación: la seguridad en robots. Un robot no es verdaderamente “colaborativo” hasta que su entorno de trabajo es completamente seguro para los humanos. La plataforma de Universal Robots cuenta con un sistema de seguridad certificado y robusto, pero depende de ti configurarlo correctamente según las necesidades de tu aplicación y un análisis de riesgos previo.
La configuración de la seguridad en robots se encuentra en una sección protegida por contraseña dentro de la pestaña “Instalación” en PolyScope. A continuación, exploraremos las capas de protección que aprenderás a implementar.
Parada de Emergencia vs. Parada de Salvaguarda
No todas las paradas son iguales. Es vital entender la diferencia entre estas dos funciones de seguridad críticas.
Parada de Emergencia (E-Stop)
Piensa en el gran botón rojo. Esta es una parada de Categoría 0. Cuando se activa (ya sea desde el Teach Pendant o un botón externo), corta la energía de los motores del robot de forma inmediata y contundente. Es una medida drástica para situaciones de emergencia reales y requiere un procedimiento de reinicio completo para reanudar la operación.
Parada de Salvaguarda (Safeguard Stop)
Esta es una parada inteligente de Categoría 2. Es activada por dispositivos de protección como barreras de luz o escáneres de seguridad. La parada de salvaguarda detiene el movimiento del robot, pero mantiene la energía en los motores. Esto permite una reanudación rápida del programa (a través de un botón de “reset”) tan pronto como la condición de peligro desaparece (ej. una persona sale de la zona protegida).
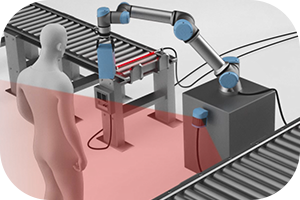
El Rol del Escáner de Seguridad en Robots
Un escáner láser de seguridad es uno de los periféricos más comunes para garantizar la seguridad en robots colaborativos. Este dispositivo mapea el suelo alrededor del robot y puede tener múltiples zonas de advertencia, permitiendo una interacción fluida y segura.
Su función es doble:
- Zona de Advertencia (exterior): Cuando una persona entra en esta primera zona, el escáner envía una señal al robot para que active el Modo Reducido. El robot disminuye su velocidad a un nivel seguro predefinido, pero continúa con su tarea, permitiendo una colaboración cercana.
- Zona de Protección (interior): Si la persona se acerca más y entra en esta zona, el escáner activa una Parada de Salvaguarda, deteniendo por completo el movimiento del robot hasta que la zona esté despejada.
Límites Virtuales en la Seguridad en Robots
Además de los dispositivos externos, puedes crear “jaulas virtuales” para el robot directamente en el software.
Planos de Seguridad (Safety Boundaries)
Puedes definir hasta 8 planos virtuales que actúan como muros invisibles. El robot no podrá cruzar estos límites con ninguna parte de su brazo. Esto es fundamental para proteger maquinaria costosa o zonas de paso de personal que se encuentren cerca del área de trabajo del robot.
La Esfera de la Herramienta (Tool Sphere)
Para que los planos de seguridad funcionen, el sistema debe saber qué tan grande es la herramienta que el robot está usando. Al configurar una esfera de herramienta, defines un volumen virtual alrededor del TCP. El sistema de seguridad en robots utilizará esta esfera para asegurarse de que ninguna parte de la herramienta (o la pieza que carga) cruce los planos de seguridad.
Dominar estas configuraciones es una responsabilidad ineludible y la base para una automatización colaborativa exitosa y, sobre todo, segura.
<< Volver a la guía completa: Conoce el Curso e-Series Core Universal Robots >>
<< Anterior: Módulo 6 - Programación de Robots con Hilos (Threads)
Siguiente: Módulo 8 – Cómo Optimizar un Robot UR: Guía Final >>






Your post is a true masterpiece. I\’ll be referencing it in my own work.
I\’m so glad I found your site. Your posts are consistently excellent.
I love how your posts are always so well-structured and easy to follow. Keep it up!
I\’m honored to hear that. I\’m always striving to provide the best information possible.